
| 所属 | 大学院情報理工学研究科 情報学専攻 機械知能システム学専攻 兼務 |
| メンバー | 木村 航平 助教 |
| 所属学会 | 米電気電子学会(IEEE)、日本ロボット学会、計測自動制御学会、日本機械学会 |
| 研究室HP | https://www.robo.lab.uec.ac.jp/ja/ |
| 印刷用PDF | 木村航平 研究室(PDF:3.8MB) |
掲載情報は2026年5月現在

ロボット工学、制御工学、形態変化、多機能化、登攀ロボット、ヒューマノイド、階段清掃ロボット、片付けロボット、グリッパ開発、マニピュレーション
ロボットハンド(グリッパ)で棒状や格子状の面をつかみながら登るロボットや、つかむ場所のない壁面に対して、吸盤や磁石で吸着しながら登るロボットなどが近年開発されています。これらは従来、異なる移動環境に対して異なる機体や手先(エンドエフェクタ)が必要でした。また、作業(タスク)の観点では、例えば、階段清掃ロボットのように、階段の水平面(踏板)に限定した清掃を行う事例はありますが、「階段を登る」「踏板を拭く」だけでなく、「階段の鉛直面(蹴込板)を拭く」「障害物を取り除く」といった異なるタスク要件が求められる場合、別の異なる機体や追加の腕(マニピュレータ)が必要となり、機体の大型化や重量の増加、複雑化が避けられないといった課題がありました。このようにロボット分野では、環境や技能に応じて必要な機体や装置が異なることから、各領域で別々に技術開発が進められているのが現状です。
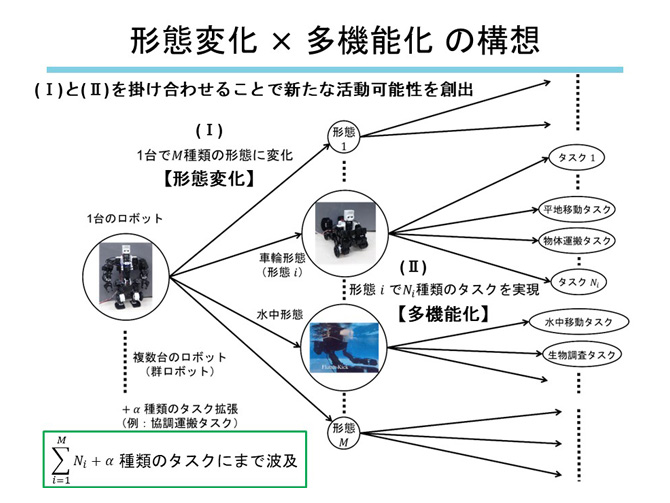
そうした背景において、木村航平助教は、「同一の機体で複数の役割を担うロボットをつくる」ことを目指し、主宰する研究室では、Ⅰ)多様な形態に変化する形態変化、Ⅱ)多様なタスクを実現する多機能化、の両輪を回したロボティクスの研究教育基盤を確立してきました。加えて、形態変化のみでは周囲環境への働きかけに乏しく、多機能化のみでは活動環境に制約があることから、両者を相補した独自のⅢ)形態変化と多機能化の統合に関する研究開発も推進していきたいと木村助教は考えています。
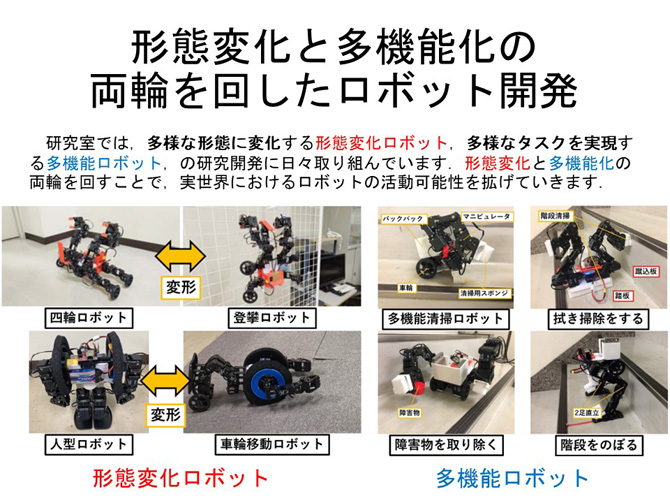
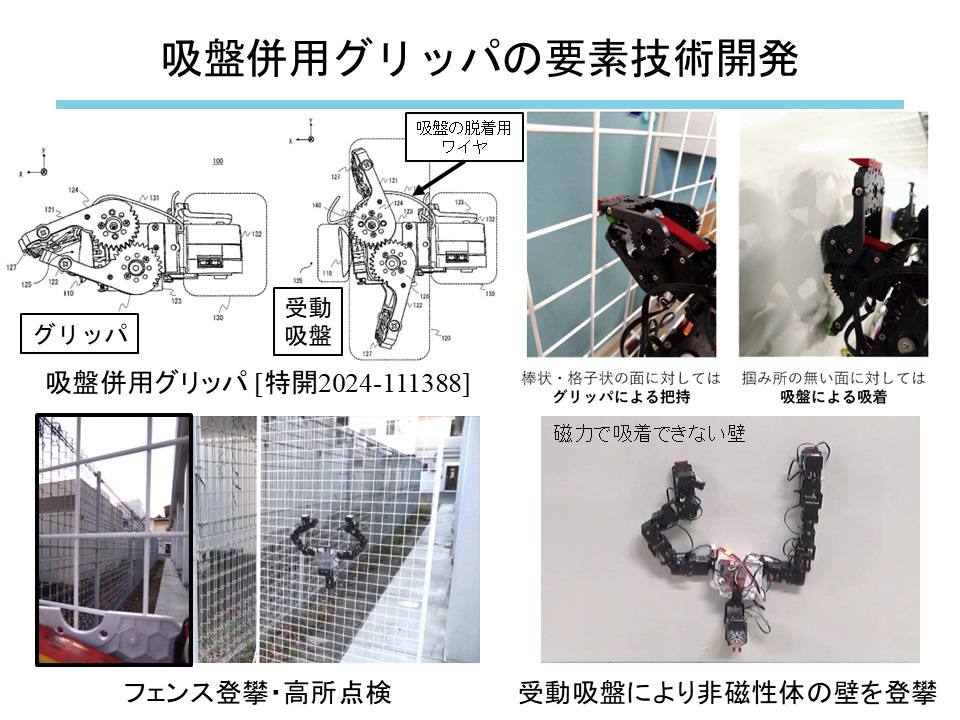
そのために、まず形態変化ロボットの一つとして、同じ機体でフェンスと壁面の両環境をよじ登る登攀ロボットを開発しました。木村助教は、グリッパと吸盤を切り替えられる「吸盤併用グリッパ」装置を考案し、格子状のフェンスなどはグリッパで把持し、つかむ場所のない平たい面は吸盤で吸着できる、高所点検などが可能な登攀ロボットを作製しました。受動吸盤により、磁力で吸着できない壁なども登ることができます。また、開発した吸盤併用グリッパは特許も取得しています。
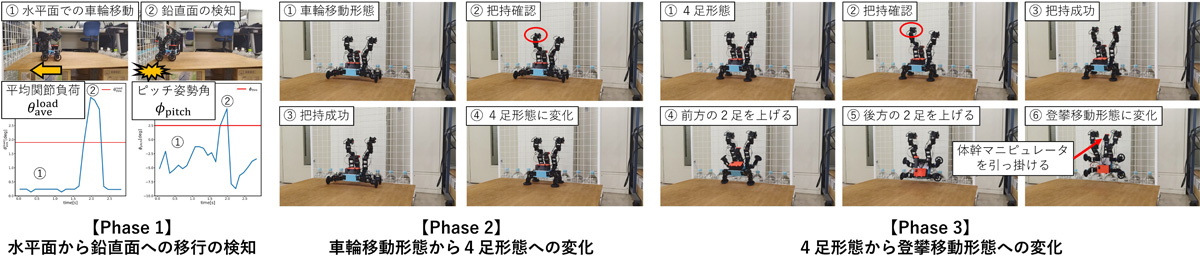
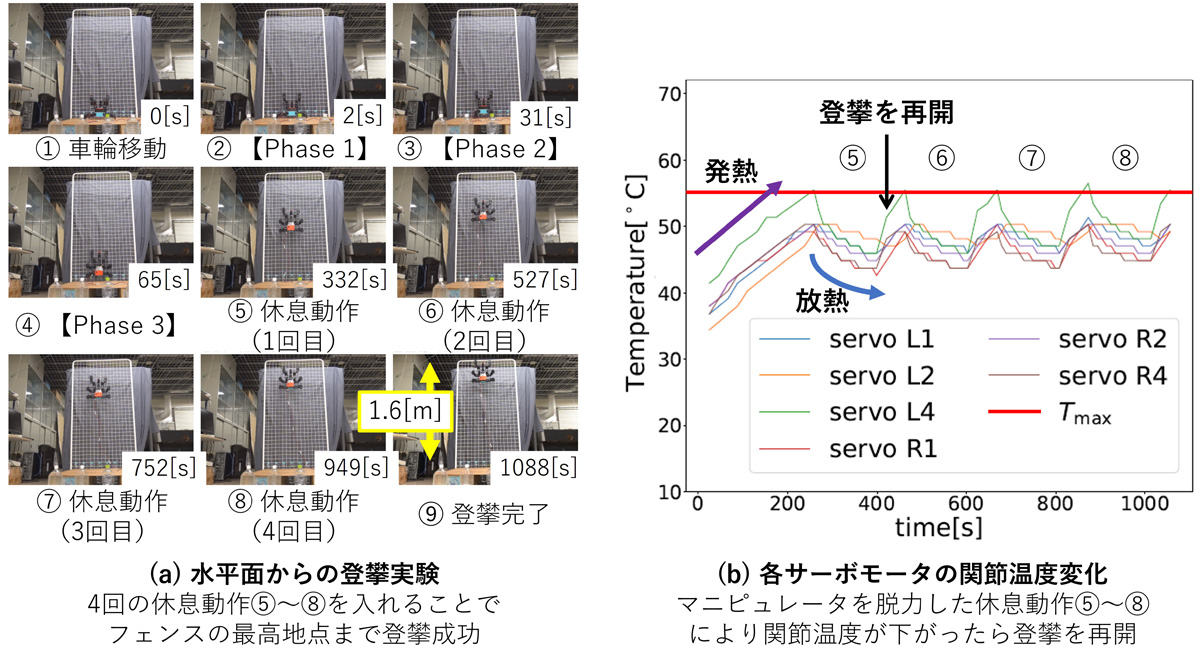
これに加え、車輪の移動形態からフェンスの登攀形態へと変化するロボットも開発しました。このロボットは、水平面では四輪ロボットとして動き、鉛直面に衝突した際のマニピュレータにかかる関節負荷と機体の姿勢角の変化に基づいてフェンス面を検知すると、いったん停止してフェンスの把持確認動作で探索を実行します。ここで把持に失敗すると、横に移動してふたたび適切な位置を探索します。把持に成功したら、その双腕のマニピュレータを一つ上の段に動かし、再度、把持を確認した上で、マニピュレータと車輪部を折り畳んで機体を持ち上げ、フェンス登攀形態に変形します。
上述の形態変化後の登攀動作中には、ロボットの関節部分のサーボモータの温度が上昇し、一定値に達すると、体幹と双腕のマニピュレータを脱力して「休息」を取り入れ、この仕組みによって発熱に対処しながら、長時間の登攀を実現しています。実際に約1.6メートルの高さのフェンスを登れることを実機で検証しています。
直近では、同一の機体で車輪の移動と、フェンスに限らず壁面の登攀が可能な形態変化ロボットも開発しており、「工場など、柵内の設備の高所監視や異常検出、窓の登攀など日常点検作業などに応用できるのではないか」と木村助教は実用化を見すえています。これに加え、高所作業用の遠隔操縦デバイスも独自に開発しており、バイラテラル制御により遠隔での物体操作が可能なネット(網)登攀ロボットなども作製しています。
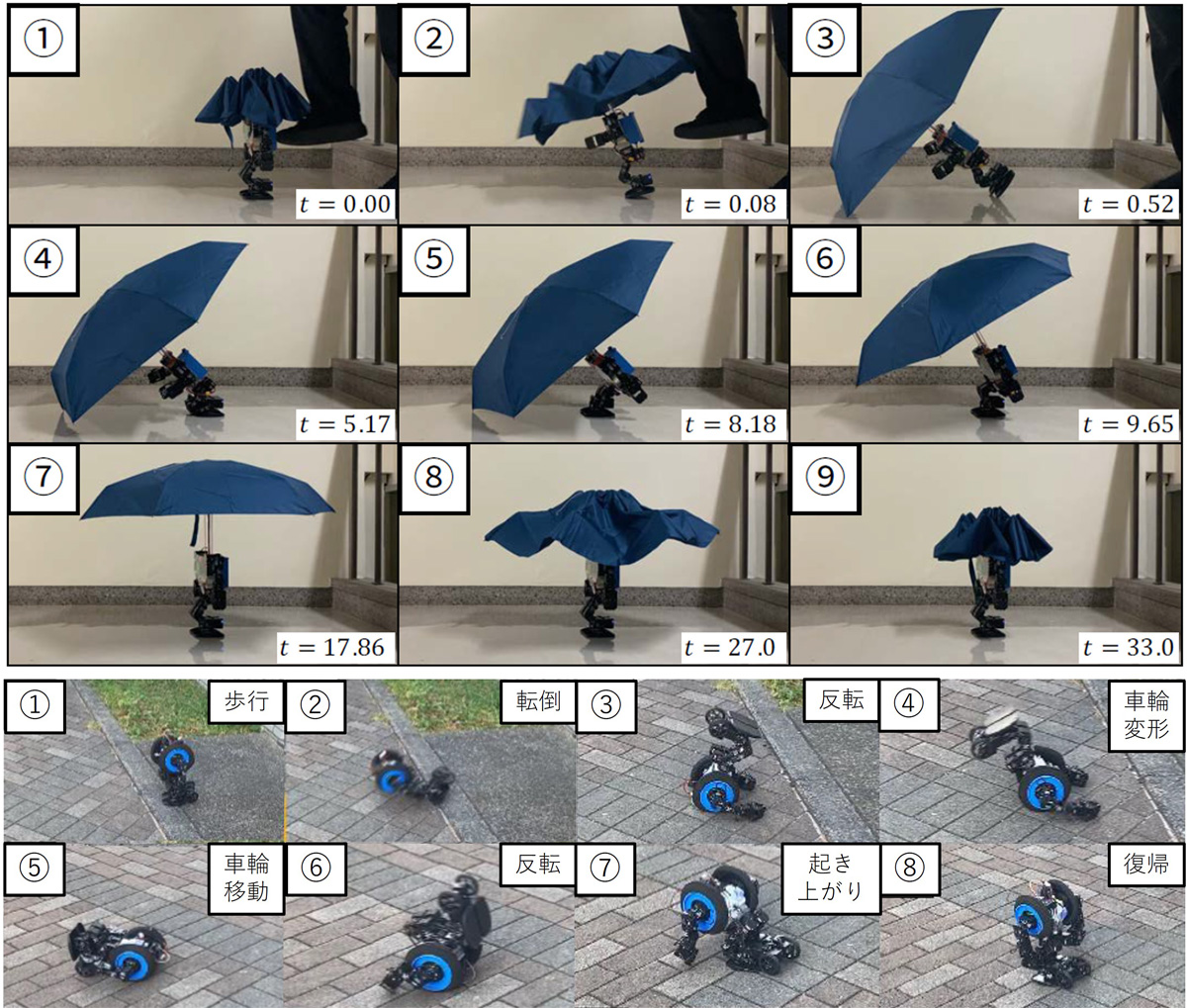
二つ目の形態変化ロボットとして、不安定な人型ロボットの形態を変化させ、転倒に対してロバストな安全装置を備えた形態変化ヒューマノイドがあります。その中でも、傘型のロボットは、ヒューマノイドの頭部を折り畳み傘に替え、独自に開発した傘の開閉機構によって、転倒時に姿勢センサで検出し、同時に傘を開くことでその時の衝撃を吸収します。その後は手を使わずに起き上がり、ワイヤを巻き取りながら傘を自ら閉鎖します。このほか、ヒューマノイドの肩部に柔らかい受動車輪、脚の後方に能動車輪を搭載し、段差や坂道で転倒しても衝撃を緩和できる車輪変形型のヒューマノイドなども試作しています。
一方、多機能ロボットの領域では、階段清掃ロボットを開発しました。階段を登り、姿勢を変えながら、踏板と蹴込板の拭き掃除をし、拭けない対象物については回収や除去を行います。ロボットの構成要素であるスポンジホルダー付きマニピュレータを「階段の登攀」、「踏板の拭き掃除」、「蹴込板の拭き掃除」、「拭けない対象の回収や除去」といった個々のタスクに共通利用させることで、同じ機体で多くのタスクをこなせるようになりました。
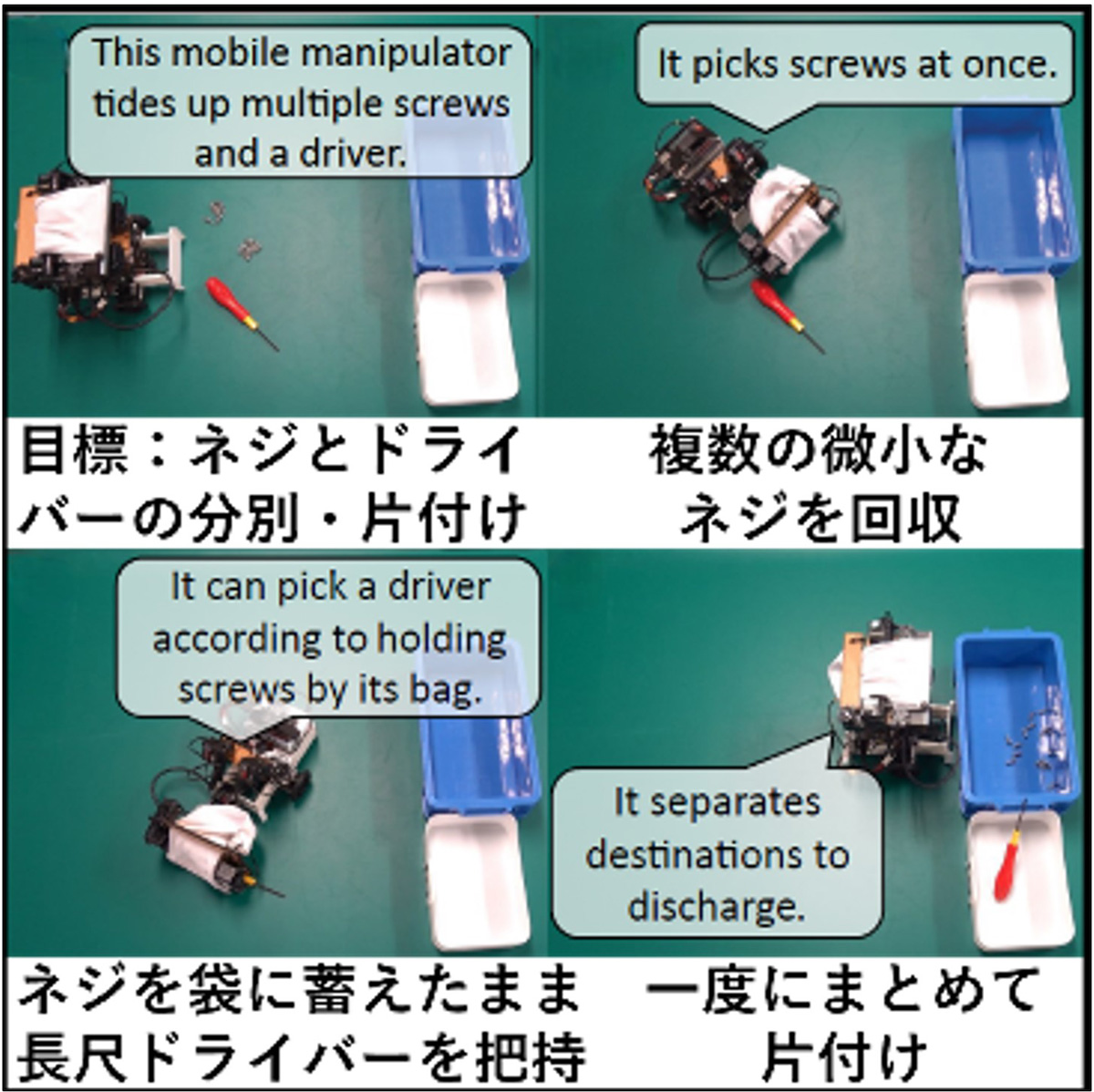
もう一つの多機能ロボットは、袋を活用した大小・個数さまざまな物体の片付けロボットです。これはロボットに布製の袋を取り付けることで、床面に置かれたボトルや薄板から、ネジなどの微小な物体、さらには機体よりも大きな長尺物などを袋の中に回収でき、そのまま移動して運搬することも可能なロボットです。さらに、袋付きマニピュレータに独自で開発した区切り機構を設けることで、複数の物体を同時に回収して仕分けができる、分別・片付けロボットも実現しています。
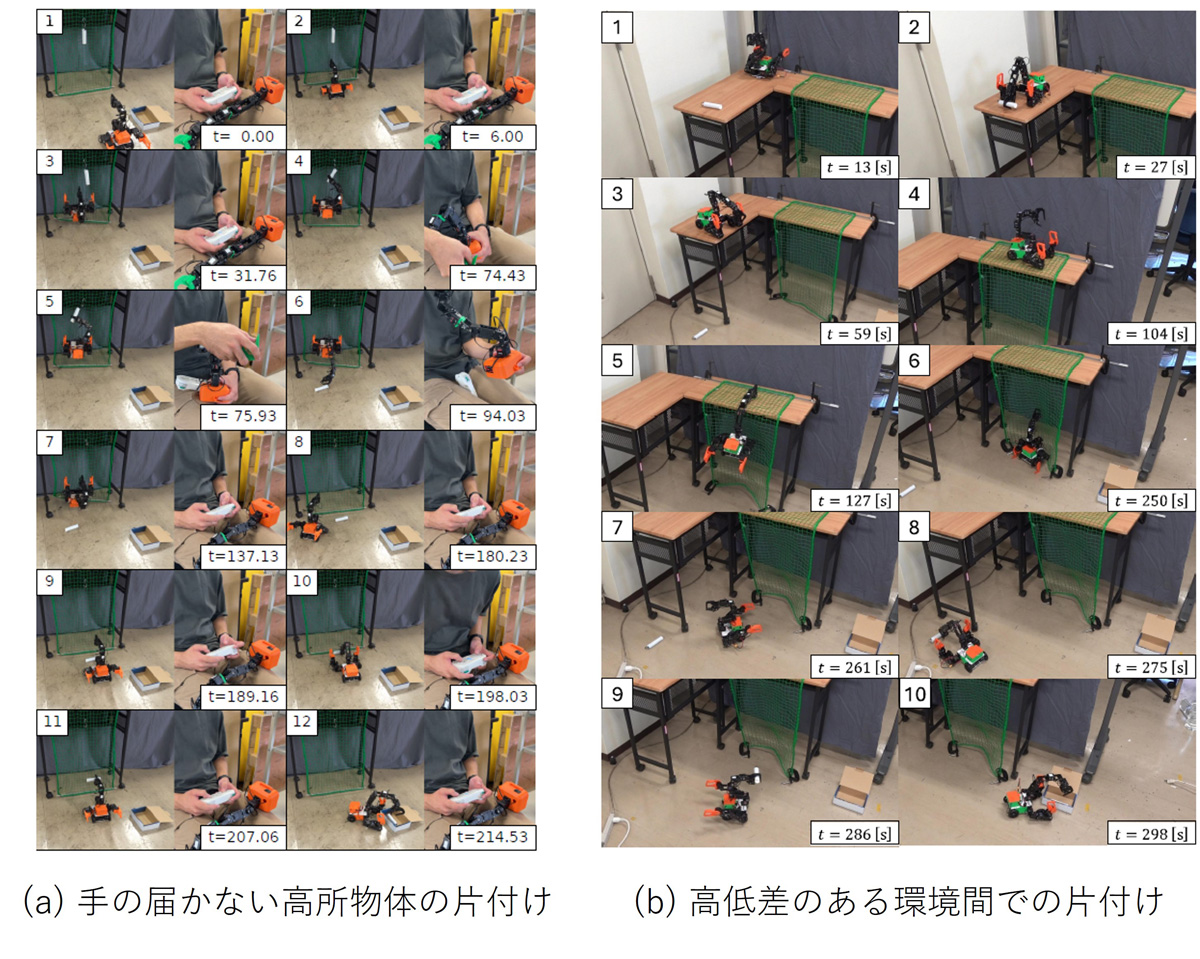
これらの形態変化ロボットと多機能ロボットの開発実績を活かし、木村助教は最近、登攀型と車輪型の形態変化・移動と作業の多機能化を統合したロボット開発にも着手しています。つかむ所が定まらない柔らかいネットでも確実に把持して登攀移動でき、かつ剛体の物体操作も可能なカラビナ型グリッパの要素技術を開発しました。カラビナ型グリッパを車輪付き登攀ロボットに適用し、手の届かない高所物体の片付けや、高低差のある環境間での片付けを、登攀型と車輪型で形態変化させながら移動と作業の多機能化を実現する一連の統合動作を確認しています。
木村助教は「形態変化と多機能化を組み合わせることで、壁を登ったり、水中を泳いだり、空を飛んだりとさまざまな姿に変形しながら目的地へ移動し、高所作業や物体運搬、清掃など幅広いタスクをこなす万能なロボットを開発したい」と展望を語り、ロボットのまだ見ぬ可能性に大きな期待を寄せています。
【取材・文=藤木信穂】