
掲載情報は2017年3月現在
| 所属 | 大学院情報理工学研究科 情報学専攻 |

Takashi SUEHIRO 
Shunsuke KUDOH |
| メンバー | 末廣 尚士 教授、工藤 俊亮 准教授 | |
| 所属学会 | 米電気電子学会(IEEE)、日本ロボット学会、計測自動制御学会 | |
| 研究室HP | http://www.taka.is.uec.ac.jp/ | |
| 印刷用PDF |
サービスロボット、知能システム、人間行動観察学習、コツ、スキル、柔軟物操作、ひも結び、折り紙、風呂敷包み、RTミドルウェア、コンピュータビジョン
近年、ロボットは人工知能(AI)の革新によって、モノを的確にとらえる「認識」技術が向上し、さらに、自動運転に代表されるように「移動」の技術も格段に発展しました。一方で、「操作」技術についてはどうでしょうか。例えば、工場などで稼働する産業用ロボットは、一見すると操作しているようですが、これは実は「つかんで移動する」という動作を繰り返しているだけです。
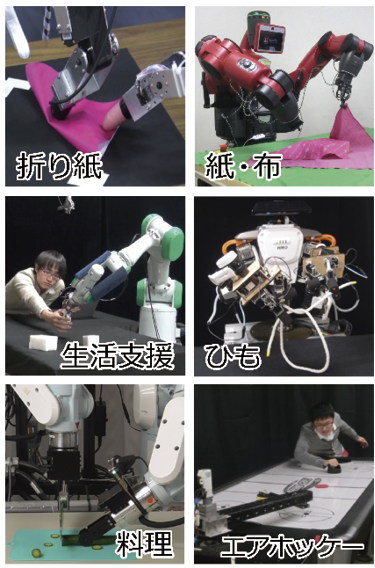
末廣尚士教授と工藤俊亮准教授の研究室では、ロボットに巧みにモノを操らせるための研究に取り組んでいます。主に紙や布、ひもなどの柔らかい「柔軟物」をロボットに操作させることを目指しています。というのは、将来、家庭に導入されるロボットは、例えば洗濯物を畳むといったように、柔軟物を扱うことが多いと考えられるからです。しかし、産業用ロボットなどが扱う形の決まった「固形物」とは違って、柔軟物は動きが予測しにくいため、ロボットに扱わせるのは至難の業なのです。
さらに重視しているのは、特定のモノを操作する専用のプログラムを載せずに、ロボットが自ら考え、さまざまなモノをモノに合わせて適切に操るという自律性を持たせることです。研究室では折り紙を折る汎用的な「折り紙ロボット」を開発していますが、これは、「鶴」を折ることに特化したロボットを作るというような、従来の専用ロボットの開発とは一線を画しています。
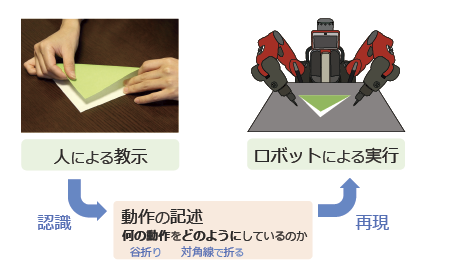
開発した折り紙ロボットでは、谷折りや袋折りといった折り操作を組み合わせることで多様な形が作れます。その仕組みは、紙を折る際の基本的な操作を記述した「折り紙公理」をあらかじめロボットに教えておき、その上で、折る前と折った後の各工程の画像をロボットに見せ、どの公理が適用されたのかを推定させます。公理が分かれば、それに沿って折れば目的の折り紙が完成します。最終的には、人間が折っている様子を見せ、その場でロボットにまねさせる“見まね学習”をさせることが目標です。
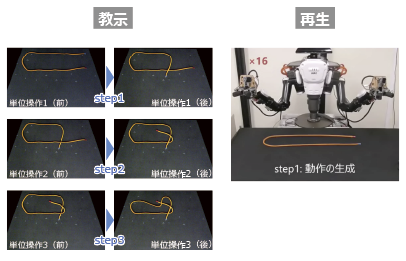
一方、ひも結びロボットは、ロボットが机上や空中でひもを巧みに操って結びます。これは既に見まね学習ができており、人間がひもを結ぶ動作をロボットが見て、その動作前後のひもの形を比較して解析します。その際、最も遠くに移動した部分を人間が持って動かした箇所であると解釈して、そこをつかんで輪に通し、引っ張って結び目を作るのです。動作はまだかなりゆっくりですが、その場でやって見せるだけで、誰でもロボットに「止め結び」や「八の字結び」を教えられることを確認しました。
ただ、人間の動きをロボットに理解させるためのモデルづくりは一筋縄ではいきません。モデルづくりでは、人間が行う作業をいかに単純化し、ロボットが分かる明確な指令として出すかが重要になりますが、その際に細かく記述するのではなく、どちらかと言えば人間が理解するのと同じような、ラフで抽象的な指令を出すのですから、開発は試行錯誤の連続です。ロボットを柔軟に動かすには、まだ多くのハードルがあるのです。
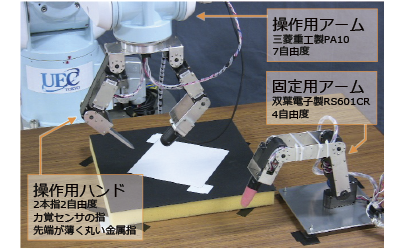
また、モデルだけでなく、ロボットのスキルも重要です。工藤准教授によれば、「カメラの死角でひもを認識できなかったり、ひもを2本まとめてつかんでしまったりといった失敗はまだ多い」そうで、ロボットの手先の器用さにもその性能は左右されます。そのため、ソフト面だけでなく、優れたロボットハンドの開発などハード面の研究にも力を入れています。ロボットの賢い動作には、こうした高性能なモデルと高度なスキルの両輪が不可欠なのです。
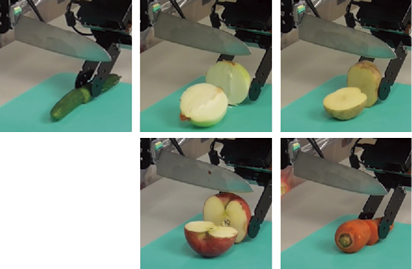
そのほか、包丁を握って野菜を切ったり、調味料を計ったり、パンにバターを塗ったりといった作業を行う「料理ロボット」も開発中です。既に、同一のプログラムで、にんじんやきゅうり、じゃがいもなど多種類の野菜を、その野菜に応じた力加減や切り方でカットできています。計量については、しょうゆや塩、マヨネーズなどの調味料の種類を判別し、それぞれの色や形態、粘性などに応じた適切な方法で、必要な分量を計り取ることができます。
現在は、人間が見る通常のレシピをロボットの作業工程に落とし込んだ上で、それを一つずつロボットに実行させている段階です。将来は、レシピを見せるだけで、人間と同じような動作で調理させることを目指しています。例えば、ロボットがにんじんを手に取った時に、それが「にんじん」であると正確に認識し、「にんじんはどのように扱うものか」といった知識を引き出して、的確な作業を行わせるのです。
専用ロボットから汎用ロボットへ――。こうした流れは今後、ますます加速していくでしょう。言うまでもなく、多種多様な作業が求められる家庭においては、自律的に動き、どんなモノでも適切に扱える汎用ロボットでなければ、人間を手際良く支援できないからです。
AIはこれまで認識技術に多く活用されてきましたが、末廣教授は「今後、操作技術にもAIを導入できるかもしれない」と期待しています。人間のように柔軟な指令で動くロボットは、開発が困難なぶん、実現すれば、多くの領域で活躍させられることは間違いありません。
【取材・文=藤木信穂】