【ニュースリリース】人の姿勢はこれから起こる乱れにどのように備えているのか? 重力を活用した姿勢調整が自然に現れる予測的姿勢制御の仕組みを解明
2026.05.12
ポイント
- 人は姿勢の乱れを予測できると、外乱が起こる前から無意識に姿勢を調整する
- その際、重心は前へ動くのに、後方へ働く筋が活動するという一見矛盾した現象が見られる
- 本研究は、この現象が筋力だけでなく重力をも利用した合理的な姿勢制御戦略であることを明らかにした
- ヒト実験と筋骨格シミュレーションにより、この戦略が将来の状態を予測しながら最適に動く仕組みから自然に現れることを示した
概要
舩戸徹郎准教授(機械知能システム学専攻)、東京大学大学院総合文化研究科 広域科学専攻の柳原大教授らの研究グループは、人が将来起こる姿勢の乱れを予測して、あらかじめ重力を活用しながら姿勢を調整している仕組みを明らかにしました。
人は、床が傾くなどの変化を事前に予測できる場合、その影響を小さくするために、外乱が起こる前から重心を移動させて備えることが知られています。しかし、その際に見られる筋活動と身体運動の関係には、従来の単純な制御の考え方では説明しにくい点があり、その仕組みは十分にわかっていませんでした。
本研究では、ヒトを対象とした実験と筋骨格シミュレーションを組み合わせることで、この現象のメカニズムを解析しました。その結果、人は筋力だけで身体を動かしているのではなく、重力による身体の動きをうまく利用しながら、効率的に姿勢を調整していることがわかりました。さらに、このような制御は、将来の身体状態を予測しながら、その時々で最も適した動きを選ぶ仕組みから自然に現れることが示されました。本成果は、姿勢制御の新たな理解を提供するとともに、転倒予防や神経疾患のリハビリテーション、人間らしい動きを実現するロボット制御への応用が期待されます。
この成果は英国の科学誌Communications Biologyに掲載されました。
背景
人は、これから起こる姿勢の乱れを予測できると、その影響を小さくするために、あらかじめ身体を動かして備えることがあります。このような「予測的姿勢制御」は、腕を上げる、手を伸ばす、歩き始めるといったさまざまな動作に先立って見られ、運動を滑らかに行うための基本的な機能と考えられています。実際に、この機能が小脳疾患やパーキンソン病などで損なわれると、姿勢の維持や歩行開始が難しくなることが知られています。
一方で、立っているときに起こる外乱に対して、人がどのように予測的に姿勢を調整しているのか、その仕組みは十分にはわかっていません。これまで、反射応答の調節や、感覚情報にもとづく最適な姿勢制御の研究が進められてきましたが、外乱が起こる前に見られる重心移動のような、より能動的な予測動作がどのような計算原理によって生み出されるのかは未解明でした。そこで本研究では、人の予測的姿勢制御が、将来の身体状態を見越して動きを作る仕組みによって説明できるかを検証しました。
手法
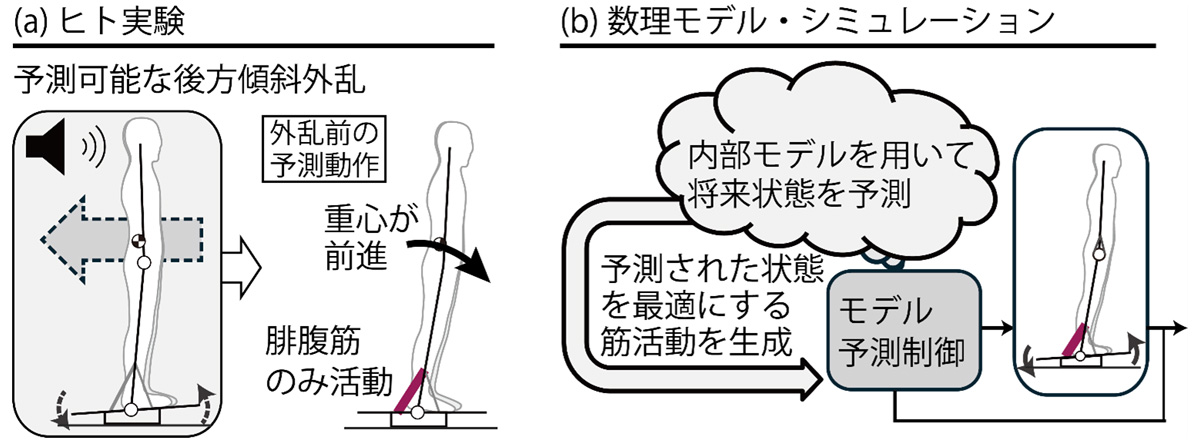
本研究では、ヒトが外乱の前にどのように姿勢を変化させるかを調べるため、立っている床が一定時間後に傾く実験課題を用いました。被験者には、床が傾く前に合図を与える条件と与えない条件を設定し、重心位置や筋活動を計測しました(図1(a))。
さらに、この実験結果を説明するために、足関節と股関節を備えた筋骨格モデルを構築しました。そして、将来の身体状態を予測しながら、最も適した筋活動を作る「モデル予測制御」によって筋活動が作られるシステムを想定し(図1(b))、シミュレーションによって挙動を調べました。これにより、実験で観察された予測的な重心移動と筋活動が、どのような制御原理から生じるのかを検証しました。
成果
ヒト実験では、床が傾く前に重心が前方へ移動し、その際に腓腹筋の活動が増加することが確認されました(図1(a))。腓腹筋は本来、足関節に後方へのトルクを生み出す筋であるため、この結果は従来の単純な制御の見方では説明しにくいものでした。
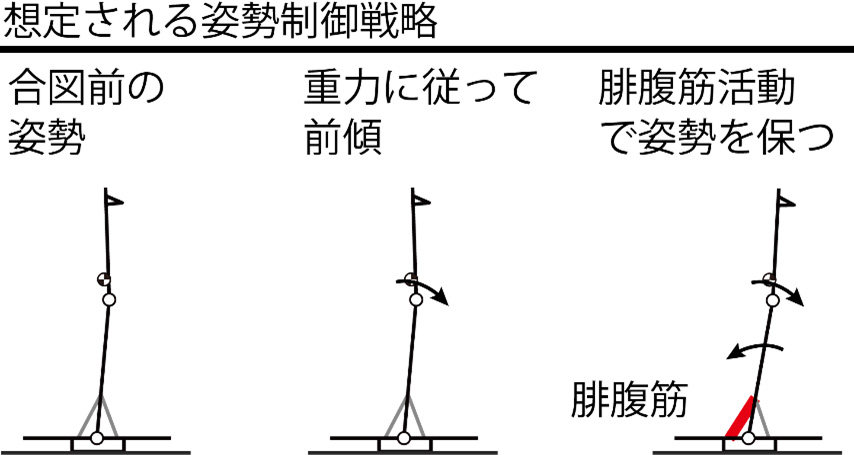
そこで筋骨格シミュレーションを行ったところ、以下のようなメカニズムが明らかになりました(図2)。
- 一時的に筋活動を弱めることで、身体が重力によって前方へ傾き、重心が前方へ移動する
- その後、腓腹筋の活動によってこの動きを調整し、安定した姿勢に保つ
つまり、人は筋力だけで身体を動かすのではなく、重力をうまく活用することで効率的に姿勢を調整していることが示されました。
また、このような制御は、将来の身体状態を予測しながら最適な制御入力を生成するモデル予測制御によって再現できることがわかりました。これは、人の予測的姿勢制御が、将来を見越した予測と最適化に基づく高度な仕組みによって実現されていることを示しています。
従来は説明が難しかった筋活動と重心移動の関係について、本研究はその背後にある合理的な制御戦略を示した点に意義があります。
今後の期待
本研究は、人の姿勢制御が単なる反射的な応答ではなく、将来の状態を見越した予測と最適化によって成り立っていることを示しました。この知見は、以下の分野への応用が期待されます。
- 高齢者の転倒予防に向けた評価法やトレーニング技術の開発
- 小脳疾患やパーキンソン病などの姿勢障害の理解とリハビリテーションへの応用
- 外乱に対して、人間のように効率よく安定化できるロボット制御技術の開発
さらに研究グループでは、同様の課題をラットの直立実験系でも進めており、小脳や大脳運動皮質がこの予測的姿勢制御にどのように関与するかを調べています。今後、こうした神経回路レベルの解析を進めることで、今回明らかになった制御メカニズムが神経系の中でどのように実現されているのか、その解明につながることが期待されます。
(論文情報)
著者名:Tetsuro Funato, Miho Ogawa, Akira Konosu, Dai Yanagihara
論文名:Anticipatory Postural Control Emerges from a Predictive and Optimized Strategy for Movement Preparation
雑誌名:Communications Biology
DOI:10.1038/s42003-026-10016-2
公表日:2026年5月11日(月)
※本論文は2026年4月6日(月)にArticle in Press版として先行公開されました。
(外部資金情報)
本研究の一部はJSPS科学研究費補助金 基盤研究(B)「予測的姿勢制御の学習的獲得のための小脳学習機構の構成原理」(24K00833)、JSPS科学研究費補助金 新学術領域研究「身体変容への超適応のモデル化」(19H05728)の補助により行われました。
詳細はPDFでご確認ください。