【ニュースリリース】ロボットの「感覚」をサイバー攻撃から守り抜く!暗号化したままでの超高精度・遠隔操作に成功
2026.03.27
ポイント
- 「触覚」の安全を守る:遠隔操作ロボットが送受信する「力」や「動き」の情報を暗号化し、ハッカーによる盗聴や改ざんを防ぐ新技術を開発。
- 性能劣化ゼロ:従来の暗号化技術では通信遅延や計算負荷が課題でしたが、本研究では「暗号化したまま制御計算」を行うことで、暗号化前と変わらないスムーズな操作感を実現。
- 社会インフラの守護神:遠隔手術や災害現場、宇宙開発など、失敗が許されないネットワーク経由のロボット操作におけるセキュリティの標準化が期待されます。
概要
小木曽公尚教授(機械知能システム学専攻)らの研究グループは、地方独立行政法人神奈川県立産業技術総合研究所と共同で、ネットワークを介したロボットの遠隔操作において、操作信号を暗号化したままリアルタイムで制御する「サイバーセキュア・バイラテラル制御」技術を確立しました。従来の遠隔操作(バイラテラル制御)では、ロボットが受ける感触(反力)を操縦者に伝える際、そのデータがネットワーク上で丸見えになるセキュリティ上のリスクがありました。本研究では、データを暗号化した状態でそのまま足し算や掛け算ができる「準同型暗号(秘密計算)」の一種を活用。これにより、第三者がデータを盗み見ても内容は解読できず、かつ操縦者は暗号化の影響(遅延や精度の低下)を一切感じることなく、安全にロボットを操ることが可能になりました。
背景
近年、5Gなどの通信技術の発展により、遠隔地からの手術や、災害現場でのロボット作業が現実のものとなっています。これらのシステムでは、操縦者がロボットの動いた距離を感じ、ロボットが物に触れた感触を操縦者にフィードバックする「バイラテラル(双方向)制御」が欠かせません。しかし、この通信データがサイバー攻撃を受けると、機密情報の漏洩だけでなく、ロボットが暴走して重大な事故につながる恐れがあります。これまでの対策では、暗号化による計算の遅れがロボットの安定性を損なうという「セキュリティと性能のトレードオフ」が大きな壁となっていました。
手法
本研究では、最も精度の高い遠隔操作を実現できる「4チャンネル・バイラテラル制御」という手法をベースにしました
- 暗号アルゴリズムの選定:暗号化したまま計算が可能な「ElGamal(エルガマル)暗号」を制御理論に応用。
- 制御器のセキュア実装:ロボットの動きを予測する「オブザーバ(観測器)」などの複雑な計算式を、暗号ドメイン上でそのまま実行できる形式に書き換えました。
- 実験検証:2軸のロボットアーム(リーダー側とフォロワー側)を用意し、暗号化を行わない場合と、提案手法で暗号化した場合の操作精度を比較検証しました。
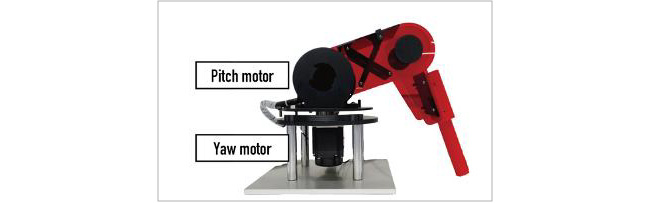
操縦者がリーダー側のロボットを動かすと、フォロワー側のロボットが同じ動きをし、触れた感触が手元に伝わります。
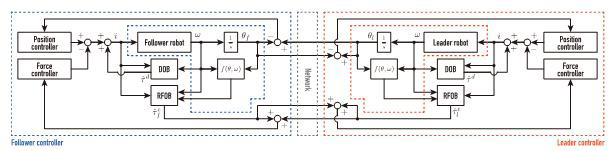
中央の点線(ネットワーク)を通るデータは、すべて特別な計算で暗号化されています。たとえ悪意のあるハッカーがこの通信を盗み見ても、中身はバラバラの数字にしか見えません。
成果
実験の結果、暗号化を施したシステムにおいても、ロボットの姿勢の同期精度や、操縦者に伝わる感覚の再現性が、暗号化前と完全に一致することが実証されました。これは、セキュリティを強化しても遠隔操作の「質」が一切落ちないことを意味します。また、暗号化によって制御パラメータ(ロボットの設定値)自体も隠蔽されるため、システムの設計思想そのものを盗用から守る「知的財産の保護」の観点からも極めて有効であることが確認されました。
今後の期待
本技術は、ネットワークを介したあらゆる精密操作の「安心・安全」の基盤となります。
具体的な活用シーン
- 遠隔医療:都市部の熟練医が地方の患者を執刀する際、患者のバイタルや手術ロボットの動きをハッキングから守る。
- インフラ点検:原子力発電所や深海など、危険な場所でのロボット作業において、制御系統の乗っ取りを防止する。
- 技能伝承:匠の技をデータ化して保存・再現する「モーション・コピー」技術において、貴重な技術データの流出を防ぐ。
今後は、より複雑な多関節ロボットへの適用や、より高度なサイバー攻撃(リプレイアタック等)に対する防御機能の強化が進むことが期待されます。
(論文情報)
タイトル:Cyber-Secure Teleoperation With Encrypted Four-Channel Bilateral Control
著者:Haruki Takanashi, Akane Kosugi, Kaoru Teranishi, Toru Mizuya, Kenichi Abe, Kiminao Kogiso
掲載誌:IEEE Transactions on Control Systems Technology
DOI:10.1109/TCST.2025.3577536
(外部資金情報)
日本学術振興会(JSPS)科学研究費助成事業 基盤研究(B) 「暗号化制御系におけるセキュリティメトリクスの顕在化」(22H01509,23K22779)
詳細はPDFでご確認ください。