【ニュースリリース】生物発光×ソフトロボティクス:生物由来の材料を用いた発光ソフトロボット・アクチュエータ・センサを開発
2025.02.14
ポイント
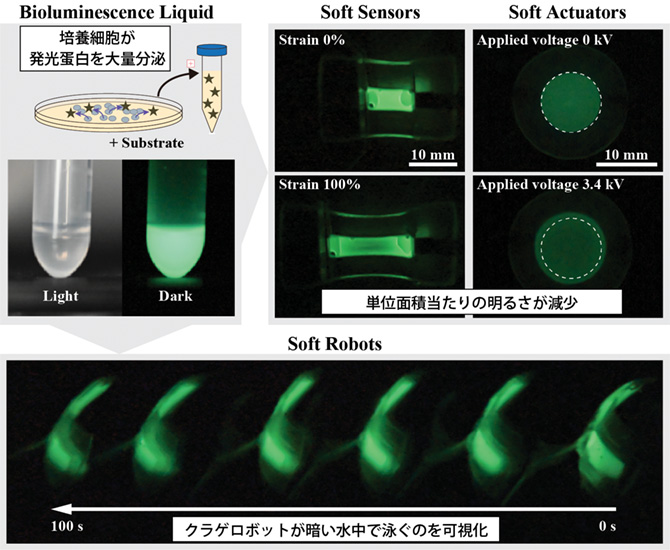
- 目で見えるほど発光強度が高い生物発光液を、哺乳類培養細胞を用いて大量かつ安定的に生産できる方法を確立
- 生産した生物発光液を使ったソフトロボティクスに適用可能な発光する電極を開発
- 開発した発光電極をソフトセンサ、アクチュエータ、およびロボットに適用する方法を考案
- 実験の結果、発光機能を活用した変形・センシングに加えて、実際の生物のようにロボットが発光しながら暗闇を移動できることを確認
- 生物由来の発光材料を活用することで、エネルギー効率が高く、無害で環境負荷の少ない発光ソフトロボット技術の実現に貢献
概要
新竹純准教授(機械知能システム学専攻)、杏林大学医学部肉眼解剖学教室の大石篤郎講師・長瀬美樹教授、国立がん研究センター研究所がんRNA研究分野の吉見昭秀分野長らの研究グループは、ソフトロボティクスにおける新たな発光機能として、生物由来の発光蛋白ルシフェラーゼを利用した生物発光の導入方法を確立しました。
生物発光は従来の電気発光や化学発光と異なり、エネルギー効率が高く、無害で環境に優しいという特長があります。研究グループはまず、哺乳類細胞由来の分泌型ルシフェラーゼを含む生物発光液体を、従来よりも発光強度が高く、大量かつ安定的に生産できる方法を確立しました。次に、この液体を使って、ソフトロボティクスに適用可能な発光電極材料を開発し、柔らかいセンサとアクチュエータの製作を行い、発光機能を活用した変形・センシングが安定的に可能であることを実証しました。さらに、防水性を施したアクチュエータを適用したクラゲ型ロボットを製作し、動作実験を行った結果、実際のクラゲのように暗闇で発光しながら遊泳できることを実証しました。
以上によって、エネルギー効率が高く、安全で環境に優しい発光ソフトロボット技術の実現に貢献しました。
成果
本研究では、大阪大学永井研究室が開発したウミホタルルシフェラーゼ由来の発光蛋白ナノランタンを、哺乳類培養細胞に培養液中で分泌させることにより、目で見える程強く光る生物発光液を大量生産することに成功しました。この液体は生物由来であるため安全で環境に優しく、発光に際し電気を消費しないため高いエネルギー効率が期待されます。次に、生産した生物発光液体にアガロースゲルを添加することで固体化による形状維持を図り、さらにこの固体の機械・電気的特性の評価を行い、ソフトロボティクスに適用可能な発光電極を開発しました。
そして、開発した発光電極を静電力で動作するアクチュエータとセンサに適用しました。これらのデバイスは、従来通りのアクチュエーションやセンシングの動作に加えて、変形に対する発光変化も示し、安定的な動作を実証しました。さらに、静電アクチュエータを発展させて、防水処理を施したクラゲ型ロボットを開発しました。このロボットは、電圧の印加によるアクチュエーションと発光電極の機能によって、実際のクラゲのように発光しながら暗闇を遊泳できることを実証しました。これらの成果により、生物発光を活用したソフトロボットの実現可能性が示され、エネルギー効率が高く、安全で環境に優しい新たなロボティクス技術への道を開くことができました。
今後の期待
本研究で実証された生物発光を活用したソフトロボットは、今後さらに多様な応用へと広がることが期待されます。特に、発光の持続性や強度の最適化により、視認性が高く実用的なロボットが実現し、医療・生体センシング、環境モニタリング、さらにはインタラクティブな人工生物システムへの応用が見込まれます。
また、生物発光を動作のトリガーや情報伝達手段として活用することで、新たな制御・通信技術の開発につながる可能性があります。さらに、本研究の環境に優しい発光技術は、持続可能なロボティクスの発展に貢献し、エネルギー消費の少ない未来のスマートデバイスや生物模倣ロボットの実現に役立つと考えられます。
(論文情報)
著者名:Kengo Kusama, Atsuro Oishi, Hitoshi Ueno, Akihide Yoshimi, Miki Nagase, Jun Shintake
論文名:Electrically driven, bioluminescent compliant devices for soft robotics
掲載誌:ACS Applied Materials & Interfaces
DOI:10.1021/acsami.4c18209
公表日:2025年2月11日
(外部資金情報)
本研究はJST創発的研究支援事業(JPMJFR2126、JPMJFR215U)の助成を受けたものです。
詳細はPDFでご確認ください。